 |
JM9 XRCU Board 0.2.0a
Libraries API Reference
|
|
JM9 XRCU Board 0.2.0a
Libraries API Reference
|
Ultrasonic Sensor Driver (TRIG-ECHO Input-Capture) for XRCU. More...
#include <Uts_tic.h>
Public Member Functions | |
| Uts_tic (const uint8_t init_port) | |
| Creates a new Uts_tic object. | |
| ~Uts_tic () | |
| Destroys this object. | |
| bool | begin () |
| Activates this ultrasonic sensor. | |
| void | end () |
| Deactivates this ultrasonic sensor. | |
| uint16_t | read_dist_mm () |
| Reads the distance between this ultrasonic sensor and the obstacle in front of it. | |
 Public Member Functions inherited from Uts_gpio Public Member Functions inherited from Uts_gpio | |
| Uts_gpio (const uint8_t init_port) | |
| Creates a new Uts_gpio object. | |
| Public Member Functions inherited from Uts_togglable | |
| virtual void | disable () |
| Teporarily disables this ultrasonic sensor. | |
| virtual void | enable () |
| Re-enables this ultrasonic sensor. | |
| Public Member Functions inherited from Uts_general | |
| uint16_t | read_dist_cm () |
| Reads the distance between this ultrasonic sensor and the obstacle in front of it. | |
Additional Inherited Members | |
| Protected Member Functions inherited from Uts_gpio | |
| bool | send_trig (bool wait_min_separation) |
| Triggers a new measurement if the previous measurement has ended. | |
| uint8_t | get_port () |
| Gets the port connected to this ultrasonic sensor. | |
| uint32_t | get_trig_pin () |
| Gets the trigger pin connected to this ultrasonic sensor. | |
| uint32_t | get_echo_pin () |
| Gets the echo pin connected to this ultrasonic sensor. | |
| bool | actual_begin () |
| Activates this ultrasonic sensor. | |
| void | actual_end () |
| Deactivates this ultrasonic sensor. | |
| Protected Member Functions inherited from Uts_togglable | |
| void | set_beginned (bool is_beginned) |
| Sets whether this ultrasonic sensor is activated. | |
| void | set_enabled (bool is_enabled) |
| Sets whether this ultrasonic sensor is enabled or not. | |
| bool | is_enabled () |
| Checks if this ultrasonic sensor is enabled or not. | |
| Uts_togglable () | |
| Constructor for a togglable ultrasonic sensor driver. | |
| Protected Member Functions inherited from Uts_general | |
| bool | is_beginned () |
| Checks if this ultrasonic sensor is already activated. | |
| void | store_prev_dist_mm (uint16_t dist_mm) |
| Stores the previous measured distance. | |
| uint16_t | get_prev_dist_mm () |
| Gets the previous measured distance. | |
| Uts_general () | |
| Constructor for a generic ultrasonic sensor driver. | |
| Protected Member Functions inherited from Supported_sensor | |
| Supported_sensor () | |
| Creates an object of a supported sensor. | |
| Protected Member Functions inherited from Supported_module | |
| Supported_module () | |
| Creates an object of a supported module. | |
| Static Protected Attributes inherited from Uts_general | |
| static const uint16_t | ERROR_DIST_MM = 8888 |
| The distance representing a measurement error (in millimeters). | |
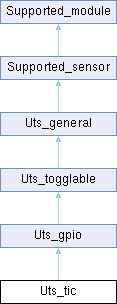
Ultrasonic Sensor Driver (TRIG-ECHO Input-Capture) for XRCU.
Ultrasonic Sensor Driver. 2-GPIO-pin TRIG-ECHO mode. Timer Input-Capture (by HardwareTimer methods).
| Uts_tic::Uts_tic | ( | const uint8_t | init_port | ) |
Creates a new Uts_tic object.
| init_port | the port connected to this ultrasonic sensor |
|
virtual |
Activates this ultrasonic sensor.
YOU MUST CALL ME IN void setup () FUNCTION TO USE THIS OBJECT PROPERLY. Configures the settings of the pin mode(s), possible communication bus(es) and this ultrasonic sensor.
true if sensor is successfully activated, false otherwise Reimplemented from Uts_gpio.
|
virtual |
Deactivates this ultrasonic sensor.
Releases the communication pins and ports and clears the memory used for this ultrasonic sensor.
Reimplemented from Uts_gpio.
|
virtual |
Reads the distance between this ultrasonic sensor and the obstacle in front of it.
Reimplemented from Uts_gpio.