 |
JM9 XRCU Board 0.1.0
Libraries API Reference
|
|
JM9 XRCU Board 0.1.0
Libraries API Reference
|
Interface of sensors that can find heading. More...
#include <Heading_sensor.h>
Public Member Functions | |
| virtual bool | reset_heading ()=0 |
| Takes the current heading of compass as zero. | |
| virtual uint16_t | get_heading ()=0 |
| Gets the heading of compass in degrees. | |
Protected Member Functions | |
| Heading_sensor () | |
| Creates a Heading_sensor object. | |
 Protected Member Functions inherited from Supported_sensor Protected Member Functions inherited from Supported_sensor | |
| Supported_sensor () | |
| Creates an object of a supported sensor. | |
| Protected Member Functions inherited from Supported_module | |
| Supported_module () | |
| Creates an object of a supported module. | |
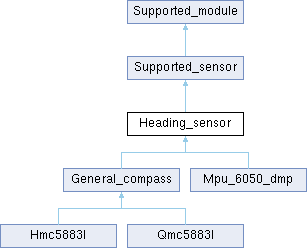
Interface of sensors that can find heading.
The API of sensors that can find heading.
|
inlineprotected |
Creates a Heading_sensor object.
This constructor is private to prevent direct instantiation.
|
pure virtual |
Gets the heading of compass in degrees.
Implemented in General_compass, and Mpu_6050_dmp.
|
pure virtual |
Takes the current heading of compass as zero.
true if compass heading is resetted, false otherwise. Implemented in General_compass, and Mpu_6050_dmp.